

Research
Our research addresses fundamental and applied issues at the intersection of Mechanics of Materials and Micro/Nano-technologies. Nanomaterials exhibit outstanding material properties as well as well-controlled defect structures. We are interested in understanding mechanical and multiphysical behaviors of nanomaterials. On the application side, we are advancing the application of nanomaterials in soft electronics (flexible/stretchable/wearable/bio electronics) and soft robotics.
Mechanical and Multiphysical Behaviors of Nanomaterials
We investigate mechanical behavior of 1D/2D nanomaterials using in-situ microscopy and spectroscopy methods (e.g., SEM, TEM, AFM, Raman and X-ray). We pioneered developing novel microelectromechanical systems (MEMS) to conduct in-situ nanomechanical testing. We have discovered a range of interesting mechanical behaviors and, combined with atomistic simulations, pinned down their mechanistic origins, such as recoverable plasticity in twinned nanowires and brittle to ductile transition in Si nanowires. Nanomaterials exhibit ultrahigh elastic strain (e.g., >10% in Si nanowires), which provides unprecedented room for tuning the physical and chemical properties, such as electronic, thermal, optical, magnetic, and catalytic properties.
Representative projects:
1) Novel nanomechanical testing methods: MEMS-based in-situ TEM testing has proven to be a powerful experimental method for small-scale mechanics, and we will continue to push the envelope. We have recently developed MEMS-based instrumentation with two new capabilities: 1) high-strain-rate loading and sensing (> 102/s), and 2) feedback control for true displacement-controlled loading. These novel capabilities will enable high-strain-rate testing, stress relaxation and fatigue testing.
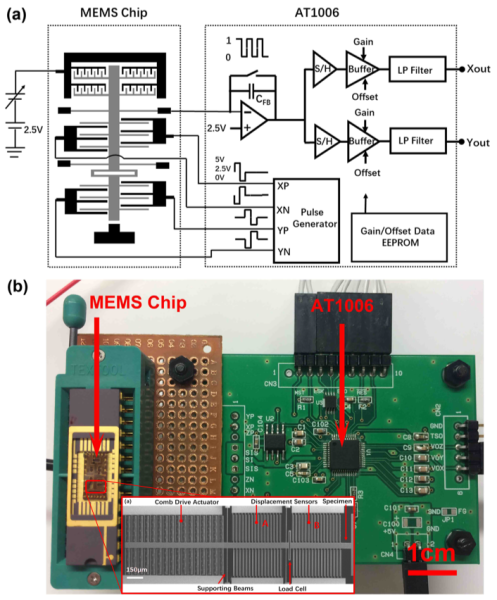
Fig. 1. (a) Functional block diagram of the capacitive readout AT1006 and its connection with the MEMS device. (b) Image of the MEMS device (inset) and the capacitive readout.
Selected references:
32. T.-H. Chang and Y. Zhu, “A microelectromechanical system for thermomechanical testing of nanostructures“, Applied Physics Letters 103, 263114 (2013). [pdf]
100. C. Li, D. Zhang, G. Cheng and Y. Zhu, “Microelectromechanical Systems for Nanomechanical Testing: Electrostatic Actuation and Capacitive Sensing for High-Strain-Rate Testing”, Experimental Mechanics 60, 329-343 (2020). [pdf]
106. C. Li, G. Cheng, H. Wang, and Y. Zhu, “Microelectromechanical Systems for Nanomechanical Testing: Displacement-and Force-Controlled Tensile Testing with Feedback Control“, Experimental Mechanics 60 (7), 1005-1015 (2020). [pdf]
2) Nanomechanical behaviors: In one example, our recent work on twinned metallic nanowires, using integrated in-situ TEM testing and MD simulations, has led to a series of new discoveries such as recoverable plasticity, Bauschinger effect, and anomalous detwinning under tension. In another, by conducting temperature-controlled in-situ TEM testing, we show that Si nanowires under tension are brittle at RT but exhibit ductile behavior with dislocation-mediated plasticity at elevated temperatures. In-situ high-resolution TEM and atomistic modeling reveal that unconventional 1/2⟨110⟩{001} dislocations become highly active at high temperature, leading to the observed brittle-to-ductile transition. Furthermore, using metallic nanowires as a model system, we have revealed the critical role of dislocation nucleation in hydrogen embrittlement.
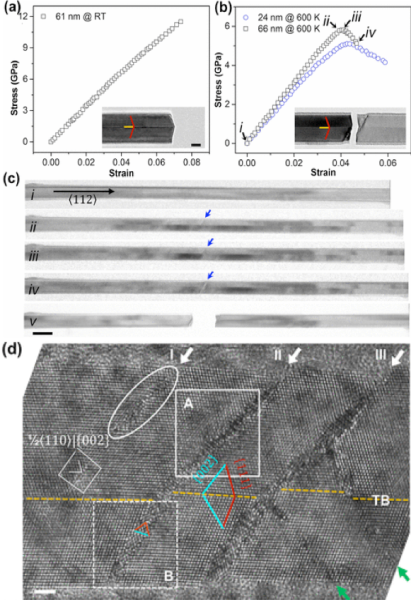
Fig. 2. In-situ TEM tensile testing of Si nanowires. (a,b) Stress-strain curves at different temperatures, RT and 600K. (c) Snapshots of microstructure evolution corresponding to (b). (d) HRTEM observation showing three stages (marked by I-III) in the formation of deformation bands.
In-situ TEM movie showing twinning deformation in single crystalline Ag nanowire
In-situ TEM movie showing recoverable plasticity in bi-twinned Ag nanowire
Selected references:
73. G. Cheng, S. Yin, T.-H. Chang, H. Gao and Y. Zhu, “Anomalous Tensile Detwinning in Twinned Nanowires”, Physical Review Letters 119, 256101 (2017). [pdf]
90. S. Yin, G. Cheng, T.-H. Chang, G. Richter, Y. Zhu and H. Gao, “Hydrogen embrittlement in metallic nanowires“, Nature Communications 10, 2004 (2019). [pdf]
95. G. Cheng, Y. Zhang, T.-H. Chang, Q. Liu, L. Chen, W. Lu, T. Zhu and Y. Zhu, “In situ nano-thermo-mechanical experiment reveals brittle to ductile transition in silicon nanowires“, Nano Letters 19, 5327-5334 (2019). [pdf]
105. G. Cheng, S. Yin, C. Li, T.H. Chang, G. Richter, H. Gao, and Y. Zhu, “In-situ study of dislocation interaction with twin boundary and retraction in twinned metallic nanowires“, Acta Materialia 196, 304-312 (2020).
Nanomaterial-Enabled Soft Electronics and Soft Robotics
We have been working on nanomaterial-enabled soft electronics and soft robotics. Different from the top-down microfabrication approach, we are among the first few groups worldwide pursuing the bottom-up approach (using nanomaterials) for soft electronics and robotics. Our work has been highlighted by the National Nanotechnology Initiative as “Nano-enabled Stretchable Electronics” (2012). For soft electronics, our lab has been focusing on wearable sensors for human health and recently for plant health. Soft robotics has received much attention recently. We have developed a novel method exploiting mechanical snap-through to significantly improve the speed of soft robots.
{kind=link}
The field of soft electronics and soft robotics is highly interdisciplinary, bridging mechanical engineering, electrical engineering, biomedical engineering, materials science, textiles and other disciplines. Novel materials and mechanical designs play a critical role in developing soft electronics and soft robotics. Scalable and sustainable nanomanufacturing is a critical enabling technology to realize nanomaterial-enabled soft electronics and robotics.
Representative projects:
1) Wearable sensors for health monitoring of humans and plants: A major application of soft electronics is wearable health monitoring of humans. Toward this end, our lab has developed a variety of wearable sensors that can be conformably attached to human skin or integrated with textiles to monitor the physiological parameters of human body, including temperature, electrophysiological, strain, tactile, and hydration sensors, as well as integration of multiple sensors for multimodal sensing. The application of wearable sensors to agriculture and plant science is in its infancy. To mitigate crop loss due to various biotic and abiotic stresses, we pioneered developing a wearable chemiresistive sensor array for real-time fingerprinting of volatile organic compounds (VOCs) that permits noninvasive and early diagnosis of plant diseases.
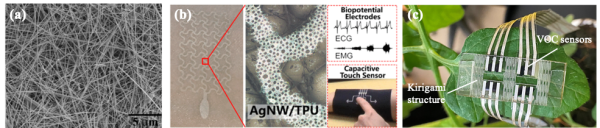
Fig. 3. (a) AgNW percolation network – basic building block for many of our soft electronics. (b) Porous AgNW/ thermoplastic polyurethane (TPU) composite for human wearable sensors. (c) Plant wearable sensors.
Movie showing Engineers Play Tetris Using Breathable Electronic Fabric
Selected references:
69. S. Yao, A. Myers, A. Malhotra, F. Lin, A. Bozkurt, J. F. Muth and Y. Zhu, “Wearable Hydration Monitor with Conformal Nanowire Electrodes”, Advanced Healthcare Materials 6 (6), 1601159 (2017). [pdf]
97. S. Yao, J. Yang, F.R. Poblete, X. Hu and Y. Zhu, “Multifunctional Electronic Textiles using Silver Nanowire Composites“, ACS Applied Materials and Interfaces 11, 31028-31037 (2019). [pdf]
104. W. Zhou, S. Yao, H. Wang, Q. Du, Y Ma, and Y. Zhu, “Gas-Permeable, Ultrathin, Stretchable Epidermal Electronics with Porous Electrodes“, ACS Nano 14, 5798-5805 (2020).
115. Z. Li#, Y. Liu#, O. Hossain R. Paul, S. Yao, S. Wu, J.B. Ristaino, Y. Zhu, and Q. Wei, “Real-time monitoring of plant stresses via chemiresistive profiling of leaf volatiles by a wearable sensor“, Matter 4, 2553-2570 (2021).
2) Soft robotics: Among the various types of stimuli, thermal actuation has drawn much attention due to programmable operation, lightweight, low actuation voltage, and potential for untethered operation. However, owing to the intrinsic thermal properties of soft materials, a major challenge of thermally actuated soft robots is the relatively low speed. We have recently reported significant increase in the actuation speed of a bimorph thermal actuator by harnessing the snap-through instability. A fast crawling robot with locomotion speed of 1.04 body length per second and a biomimetic Venus flytrap were demonstrated to illustrate the promising potential of the fast bimorph thermal actuators for soft robotic applications.
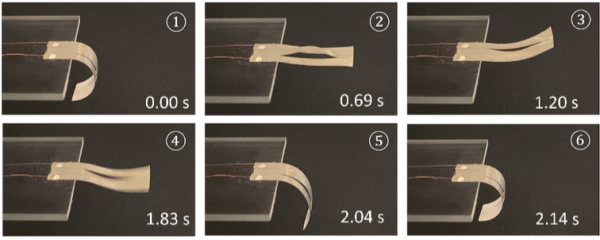
Fig. 4. A fast bending thermal actuator showing snap-through (②-③) and snap-back (④-⑥).
Movie showing a crawler based on soft thermal actuator
Movie showing a venus flytrap based on soft thermal actuator
Selected references:
120. S. Wu, L. Baker, J. Yin, and Y. Zhu, “Fast Thermal Actuators for Soft Robotics“, Soft Robotics, published online (2021).
3) Scalable and sustainable nanomanufacturing: We have developed a number of methods to fabricate AgNW devices, e.g., electrohydrodynamic (EHD) printing, gravure printing, and laser scribing. The printing resolution can go below 50 micrometer with the conductivity as high as 6×104 S/cm. We have developed scalable methods to integrate AgNW devices with textiles and other permeable substrates. In addition, we have reported a strategy to recycle nanowire percolation network. The effect of working solvent and ultrasonication time on the morphology and electrical properties of the recycled nanowire network is investigated. Sensors made of recycled AgNWs showed comparable performance. The recycling concept can be extended to other nanomaterials in the form of percolation network.
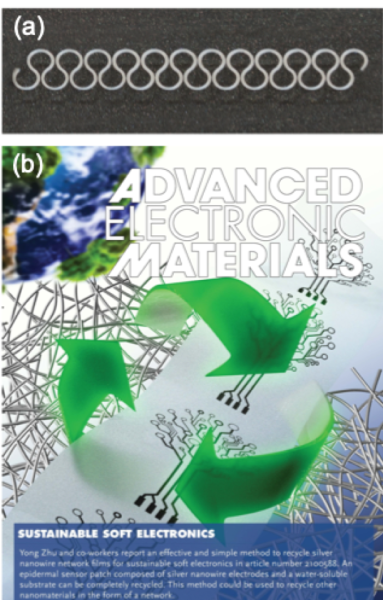
Fig. 5. (a) EHD printed features (line width 50 micron). (b) Cover art illustrating sustainable soft electronics with nanowire network.
Selected references:
76. Z. Cui, Y. Han, J. Dong and Y. Zhu, “Electrohydrodynamic Printing of Silver Nanowires for Flexible and Stretchable Electronics”, Nanoscale 10, 6806-6811 (2018). [pdf]
116. Y. Liu, H. Wang and Y. Zhu, “Recycling of Nanowire Percolation Network for Sustainable Soft Electronics“, Advanced Electronic Materials 7, 2100588 (2021).