
Renewably Powered Robotic Systems
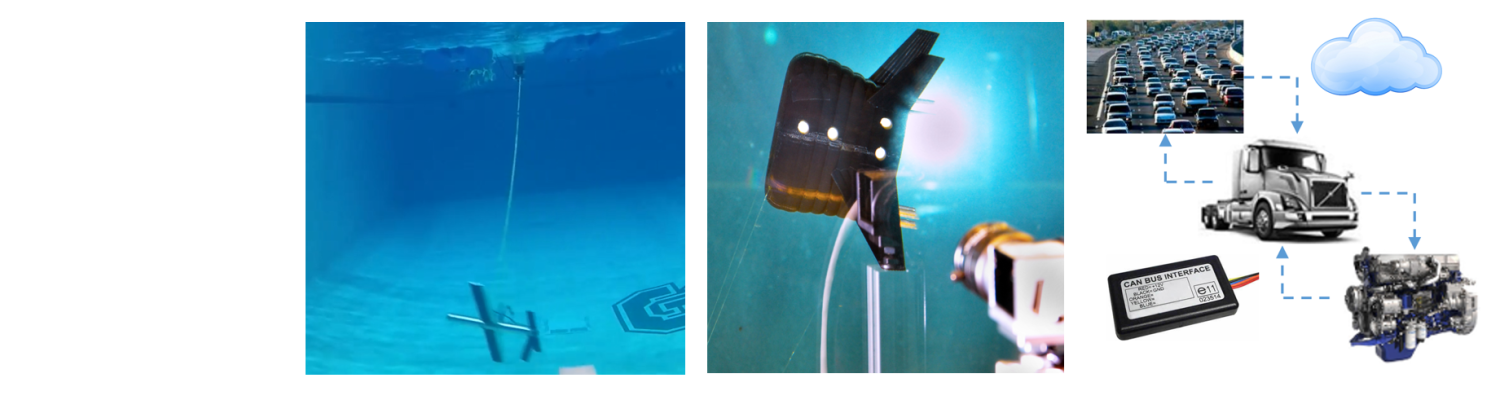
In order to perform persistent observational, surveillance, or reconnaissance missions, it is necessary to develop mobile systems (and corresponding mission planning/control algorithms) that are powered by a renewable energy resource. Several such technologies have in fact been developed, including sailing drones, autonomous solar-powered ocean vessels, wave gliders, and even ultra-light autonomous solar-powered aircraft. Three such technologies — the Saildrone, Seatrac SP-48, and Zephyr aircraft — are shown below.

Unlike traditional mobile robotic systems, which are highly range-limited but offer rather predictable mobility, renewably powered robotics turn this paradigm on its head, offering unlimited range at the expense of stochastic mobility. This demands a fundamentally new mission planning and control approach, which recognizes the fact that a series of waypoints that must be “prosecuted” over the course of a mission cannot be reached at a prescribed time with 100% certainty. Because the observational value of a mission depends not only on the selected waypoints but also on the rate at which they are prosecuted, it is essential to incorporate probabilistic information about mobility into the mission planning approach. Our lab exploring the creation of such probabilistic frameworks, along with predictive control strategies that leverage these frameworks. In doing so, we are examining two classes of renewably powered mobile systems:
- Systems with little or no on-board energy storage that can be used to provide mobility even when the renewable resource is not available. In examining this class of systems, our lab is focusing in particular on sailing drones, for which mobility is not only a function of the renewable resource but is also directionally dependent.
- Systems with on-board energy storage, allowing for mobility even in the absence of the renewable resource, while still resulting in a stochastic reachable domain over any prescribed time horizon. In examining this class of systems, our lab is focusing in particular on solar-powered ocean observational vehicles, such as the Seatrac SP-48 autonomous surface vessel.
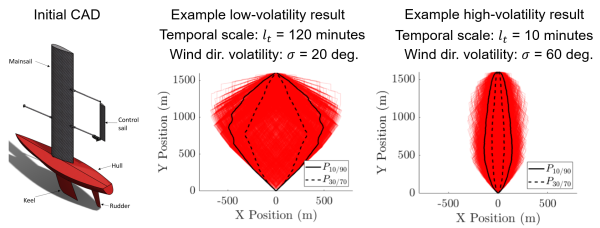
In our initial research, we have modeled a sailing drone and developed stochastic dynamic programming (SDP) algorithms that minimize the expected time to complete an upwind leg of a sailing race. This research is being extended to generate minimum-time algorithms for prosecuting waypoints, which are in-turn being determined using a dynamic coverage-based control strategy. The figure below shows the initial CAD for a sailing drone that has been modeled in our lab and is presently being fabricated for experimental deployment, in addition to initial Monte Carlo simulation results of our SDP-based optimization, for different levels of wind volatility.
Funding:
National Science Foundation, “Persistent Mission Planning and Control for Renewably Powered Robotic Systems”